
www.engineering-suomi.com
12
'26
Written on Modified on
Autonomisten ja älykkäiden robottijärjestelmien teknologia-alusta
Yaskawa Nordic on esitellyt Motoman NEXT -teknologia-alustan, joka yhdistää reaaliaikaisen ohjauksen ja autonomisen yksikön teollisuusautomaation optimoimiseksi.
www.yaskawa.eu.com
Perinteistä teollisuusrobotiikkaa on pidetty jo pitkän aikaa enemmän tai vähemmän monimutkaisena, mikäli on ollut tarvetta opettaa robotille uusia liikepisteitä, liikeratoja tai muita toimintoja. Kokemattoman käyttäjän kohdalla tämä on hyvinkin mahdollista, kunnes ohjauksen komennot tulevat tutuksi harjoituksen myötä. Perinteinen niin sanottu ohjainpendant (ohjainkapula) ja sen sisältämä käyttöliittymä sisältää itsessään monia toimintoja, jolla ohjelmointia saadaan jo sellaisenaan vauhditettua esimerkiksi liikeratojen kopioinnilla tai peilauksella.
Integroitu arkkitehtuuri reaaliaikaiseen ohjaukseen ja tekoälylaskentaan
Uusi Motoman NEXT -ohjausjärjestelmä on kokonaisratkaisu, joka hallitsee robottisovelluksen älykkyyttä ja ulkoisia laitteita. Alusta integroi perinteisen ohjausyksikön (RCU) reaaliaikaiseen liikkeenohjaukseen ja NVIDIA Jetson Orin NX -pohjaisen autonomisen ohjausyksikön (ACU). Tämä arkkitehtuuri mahdollistaa edistyneen laskennan suoraan järjestelmässä, mukaan lukien konenäön, anturi- ja voimanohjauksen sekä älykkään tarttujatekniikan. Yhdistämällä robottiradan suunnittelun ja tekoälyn yhteen yksikköön järjestelmä helpottaa integraatiota digitaaliseen toimitusketjuun.
NEX-robottisarja korkeaan tarkkuuteen ja digitaalisiin kaksosiin
Osana alustaa on julkaistu NEX-sarja, joka koostuu kevyillä servomoottoreilla ja korkealla tarkkuudella varustetuista roboteista. Robottivarsi on valettu alumiinista ja sen sisäinen mediayhteys luo määritellyn geometrian, joka on välttämätön digitaalisen kaksosen hyödyntämiseen. Ihmisen ja koneen välistä yhteistyötä varten käytetään kollaboratiivisia NHC-robotteja, jotka on varustettu:
- Voima-anturit: Kaikilla akseleilla sijaitsevat anturit mahdollistavat sujuvan käsinohjauksen.
- LED-merkkivalot: Statusindikaattorit lisäävät työturvallisuutta.
- 3D-kamera: Jalustaan sijoitettu kamera valvoo työaluetta ja tunnistaa mahdolliset esteet.
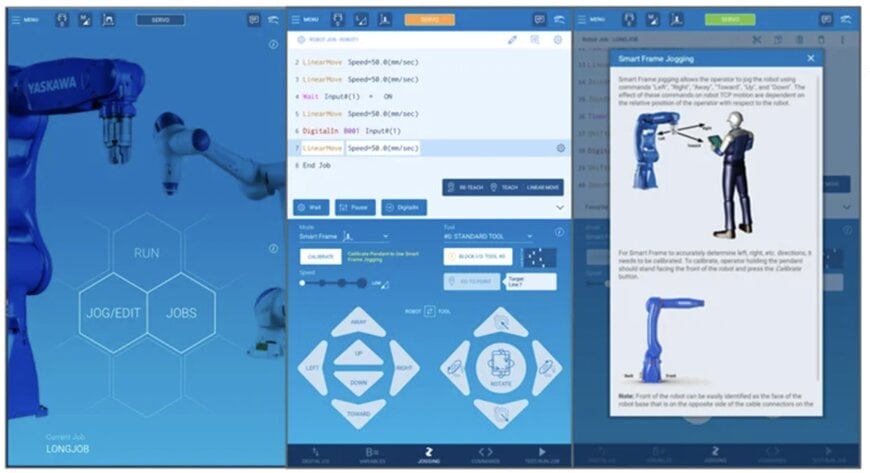
Käyttäjäkeskeinen ohjelmointi ja käyttövarmuus
Järjestelmän ohjelmointi tapahtuu käsipäätteen ja Android-tabletin yhdistelmällä. Ohjaimessa on sisäänrakennettu gyrosensori, joka tunnistaa paneelin asennon suhteessa robottivarteluun, mikä yksinkertaistaa vuorovaikutusta käyttäjille ilman laajaa robottikokemusta. Korkean tietoturvan ja operatiivisen luotettavuuden varmistamiseksi järjestelmä käyttää määriteltyjä käyttäjätasoja sekä fyysisiä turvalaitteita, kuten hätäseis-painiketta ja kolmiasentoista turvakytkintä. Teknologiaa demonstroitiin Elmia Automation -messuilla Jönköpingissä toukokuussa.
Lisäkonteksti
Tässä osiossa on yksityiskohtaisia teknisiä tietoja ja kilpailevia vertailuarvoja, joita ei sisältynyt alkuperäiseen tuotetiedotteeseen.
Motoman NEXT -alusta vastaa teollisuusrobotiikan tarpeeseen reunalaskennasta (Edge AI), jossa laskentateho siirretään lähemmäs prosessia latenssin vähentämiseksi. Integroimalla NVIDIA Jetson Orin NX -prosessorin järjestelmä tarjoaa jopa 100 TOPS (Tera Operations Per Second) tekoälysuorituskykyä, mikä on merkittävä lisäys verrattuna perinteisiin PLC-pohjaisiin ohjausjärjestelmiin, jotka vaativat ulkoisia teollisuus-PC-laitteita vastaaviin konenäkötehtäviin. Verrattuna kilpaileviin järjestelmiin, kuten ABB OmniCore tai Fanuc R-30iB Plus, Yaskawan ratkaisu erottuu ohjauspaneelin sisäänrakennetulla gyrosensorilla. Tämä tekniikka mahdollistaa "point-and-go" -vuorovaikutuksen, joka vähentää monimutkaisten ratojen ohjelmointiaikaa jopa 30 prosentilla verrattuna perinteiseen joystick-navigointiin.
Toimittanut Romila DSilva, Induportaalien toimittaja – tekoälyn mukauttama.
Järjestelmän ohjelmointi tapahtuu käsipäätteen ja Android-tabletin yhdistelmällä. Ohjaimessa on sisäänrakennettu gyrosensori, joka tunnistaa paneelin asennon suhteessa robottivarteluun, mikä yksinkertaistaa vuorovaikutusta käyttäjille ilman laajaa robottikokemusta. Korkean tietoturvan ja operatiivisen luotettavuuden varmistamiseksi järjestelmä käyttää määriteltyjä käyttäjätasoja sekä fyysisiä turvalaitteita, kuten hätäseis-painiketta ja kolmiasentoista turvakytkintä. Teknologiaa demonstroitiin Elmia Automation -messuilla Jönköpingissä toukokuussa.
Lisäkonteksti
Tässä osiossa on yksityiskohtaisia teknisiä tietoja ja kilpailevia vertailuarvoja, joita ei sisältynyt alkuperäiseen tuotetiedotteeseen.
Motoman NEXT -alusta vastaa teollisuusrobotiikan tarpeeseen reunalaskennasta (Edge AI), jossa laskentateho siirretään lähemmäs prosessia latenssin vähentämiseksi. Integroimalla NVIDIA Jetson Orin NX -prosessorin järjestelmä tarjoaa jopa 100 TOPS (Tera Operations Per Second) tekoälysuorituskykyä, mikä on merkittävä lisäys verrattuna perinteisiin PLC-pohjaisiin ohjausjärjestelmiin, jotka vaativat ulkoisia teollisuus-PC-laitteita vastaaviin konenäkötehtäviin. Verrattuna kilpaileviin järjestelmiin, kuten ABB OmniCore tai Fanuc R-30iB Plus, Yaskawan ratkaisu erottuu ohjauspaneelin sisäänrakennetulla gyrosensorilla. Tämä tekniikka mahdollistaa "point-and-go" -vuorovaikutuksen, joka vähentää monimutkaisten ratojen ohjelmointiaikaa jopa 30 prosentilla verrattuna perinteiseen joystick-navigointiin.
Toimittanut Romila DSilva, Induportaalien toimittaja – tekoälyn mukauttama.
